ƒeƒXƒg‚جچl‚¦•û
- ƒeƒXƒg[1]‚حگ”’lŒ‹‰ت‚جٹm”F‚ئƒpƒCƒvƒ‰ƒCƒ“گ§Œن‚جٹm”F‚ة‚ب‚è‚ـ‚·پB“ü—ح’l‚©‚çڈo—ح’l‚ھˆêˆس‚ةŒˆ‚ـ‚邽‚ك“ü—حڈ‡‚حٹضŒW‚ب‚¢‚و‚¤‚ةژv‚¦‚ـ‚·‚ھپAƒpƒCƒvƒ‰ƒCƒ“گ§Œن‚ًچl‚¦‚é‚ئƒXƒeپ[ƒWٹش‚حˆظ‚ب‚é“®چى‚ة‚µ‚½•û‚ھƒ‰ƒbƒ`ƒ^ƒCƒ~ƒ“ƒO‚جŒë‚è‚ًŒںڈo‚إ‚«‚é‚ج‚إ“¾چô‚إ‚·پBڈ]‚ء‚ؤپA‚ب‚é‚ׂˆظ‚ب‚é“ü—ح’l‚ھکA‘±‚·‚é‚و‚¤‚ة‚µ‚ـ‚·پi“¯‚¶’l‚ًکA‘±‚µ‚ؤ“ü‚ê‚ب‚¢پjپB
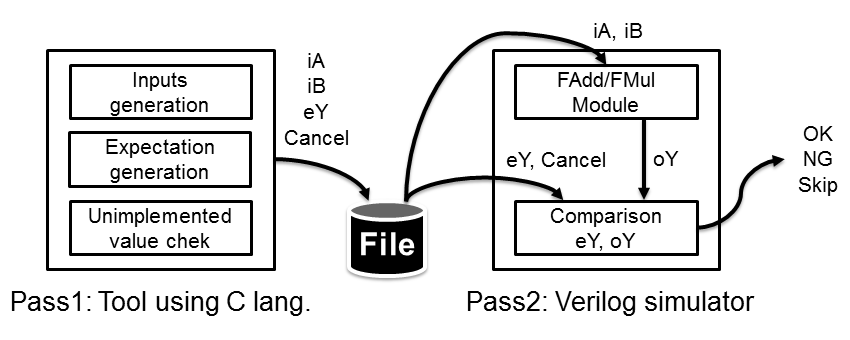
- “ü—ح’l‚ح—\‚كŒˆ‚ـ‚ء‚½“à•”‚ج“®چى‚ً–ش—…‚·‚é‚و‚¤‚ب’l‚ة‚µ‚ـ‚·پB‚»‚جŒمپAƒ‰ƒ“ƒ_ƒ€“ü—ح‚àژژ‚µ‚½‚¢‚ئ‚±‚ë‚إ‚·پBچ،‰ٌ‚حپAƒVƒ~ƒ…ƒŒپ[ƒ^ژ©‘ج‚ةژè‚ً“ü‚ê‚é•K—v‚ج‚ب‚¢2ƒpƒX•ûژ®‚ً—p‚¢‚ـ‚·پB
- 1ƒpƒX: CŒ¾Œê“™‚ً—p‚¢‚ؤƒ‰ƒ“ƒ_ƒ€‚ب“ü—ح’l‚ئٹْ‘ز’l‚ً‚ـ‚ئ‚ك‚ؤƒtƒ@ƒCƒ‹‰»
- 2ƒpƒX: RTLƒVƒ~ƒ…ƒŒپ[ƒVƒ‡ƒ“ژ‚ةƒtƒ@ƒCƒ‹‚ً“ا‚فچ‚ٌ‚إپA“ü—ح’l‚ئٹْ‘ز’l‚ًگ¶گ¬
- ٹْ‘ز’l‚حژèŒvژZ‚و‚è‚حپACŒ¾Œê‚ب‚ا‚ً—p‚¢‚½‹@ٹB“I‚بŒvژZ‚جژZڈo‚ھ–]‚ـ‚ê‚ـ‚·پB‚½‚¾‚µ‚±‚جچى‹ئ‚ھ‹بژز‚إپA“¯‚¶Œë‚ء‚½ٹْ‘ز’lگ¶گ¬ƒcپ[ƒ‹‚ة‚ب‚é‰آ”\گ«‚ھ‚ ‚è‚ـ‚·پB‚ب‚¨’Pگ¸“x‚â”{گ¸“x‚إ‚حپAPC“™‚جCPU‚جگ¶‚جŒ‹‰ت‚ًٹْ‘ز’l‚ة‚إ‚«‚ـ‚·[2]پB
- ‘g‚فچ‚ـ‚ê‚ؤ‚¢‚ب‚¢NaN‚âInfinity‚ة‘خ‚·‚éƒeƒXƒg‚à•K—v‚إ‚·پBƒVƒXƒeƒ€‘g‚فچ‚فژپA‚»‚جŒ‹‰ت‚ھچج—p•sچج—p‚ج”»’fچق—؟‚ة‚ب‚è‚ـ‚·پB
ƒeƒXƒgƒ‚ƒWƒ…پ[ƒ‹‚جٹT—v
- ٹب’P‚بƒeƒXƒgƒ‚ƒWƒ…پ[ƒ‹‚ًژ¦‚µ‚ـ‚·پB“ü—ح’l‚ئٹْ‘ز’l‚ح—\‚ك–„‚كچ‚ٌ‚إ‚¨‚•ûژ®‚إ‚·پBƒeƒXƒg–¼‚حtest‚إƒNƒچƒbƒN‚ئƒٹƒZƒbƒg‚ً”گ¶‚µ‚ـ‚·پB‚±‚ê‚ةŒؤ‚رڈo‚³‚ê‚étopƒ‚ƒWƒ…پ[ƒ‹‚حپAƒeƒXƒg‚·‚ׂ«ƒ‚ƒWƒ…پ[ƒ‹‚ئٹْ‘ز’l”نٹr‚جtsƒ‚ƒWƒ…پ[ƒ‹‚ًŒؤ‚رڈo‚µ‚ـ‚·پB
- “ü—ح’l‚حپAƒpƒCƒvƒ‰ƒCƒ“‚جƒlƒSƒVƒGپ[ƒVƒ‡ƒ“‚ج“x‚ةƒCƒ“ƒNƒٹƒپƒ“ƒg‚³‚ê‚é”شچ†‚ةڈ]‚ء‚ؤ’l‚ً•د‚¦‚ـ‚·پBtsƒ‚ƒWƒ…پ[ƒ‹‚ة‚¨‚¢‚ؤٹْ‘ز’l‚ًFIFO‚إ“¯ٹْچ‡‚ي‚¹‚µپAژہچغ‚جŒ‹‰ت‚ئ”نٹr‚µ‚ـ‚·پB‚»‚جچغپA–³Œّ‚ب“ü—ح’lپiNaN‚âInfinityپA”ٌگ³‹Kگ”پj‚ة‚حƒ^ƒO‚ً—§‚ؤ‚ؤپAٹْ‘ز’l”نٹr‚إژ¯•ت‚µ‚ـ‚·پB
- OK/NG/Skip‚ئ‚µ‚ؤŒ‹‰ت‚ًڈ‡ژں•Wڈ€ڈo—ح‚µ‚ـ‚·پB‚ب‚¨ƒTƒ“ƒvƒ‹‚إ‚حپA•ھ—ت“I‚ةƒpƒ^پ[ƒ“‚ًڈب‚¢‚ؤŒfچع‚µ‚ؤ‚¢‚ـ‚·پB
ƒeƒXƒgƒ‚ƒWƒ…پ[ƒ‹ƒTƒ“ƒvƒ‹پiRTLپj
/* **************************** MODULE PREAMBLE ********************************
Copyright (c) 2011, ArchiTek
This document constitutes confidential and proprietary information
of ArchiTek. All rights reserved.
*/
// ***************************** MODULE HEADER *********************************
`timescale 1ps / 1ps
module test;
// ************************ PARAMETER DECLARATIONS *****************************
parameter D = 1;
parameter DCLK = 5000;
parameter DCLK2 = DCLK/2;
// ************************** LOCAL DECLARATIONS *******************************
reg clk;
reg reset_n;
// ****************************** MODULE BODY **********************************
// -----------------------------------------------------------------------------
initial begin clk=0; forever begin #(DCLK2) clk=~clk; end end
// -----------------------------------------------------------------------------
initial begin reset_n=0; #D reset_n=0; #(DCLK*3.5) reset_n=1; end
// -----------------------------------------------------------------------------
top top_0 (
clk, reset_n
);
// ************************** FUNCTIONS and TASKS ******************************
endmodule
// *****************************************************************************
/* **************************** MODULE PREAMBLE ********************************
Copyright (c) 2011, ArchiTek
This document constitutes confidential and proprietary information
of ArchiTek. All rights reserved.
*/
// ***************************** MODULE HEADER *********************************
module top (
clk,
reset_n
);
// ***************************** I/O DECLARATIONS ******************************
input clk;
input reset_n;
// ************************** LOCAL DECLARATIONS *******************************
reg iVld;
wire iStall;
wire [15:0] iA;
wire [15:0] iB;
wire oVld;
reg oStall;
wire [15:0] oY;
reg [7:0] oCnt;
reg [1:0] rst;
reg reset;
// ******************************** MODULE BODY ********************************
// -----------------------------------------------------------------------------
// Pipeline drive
always @(posedge clk)
if (reset)
iVld <= #1 1'b0;
else if (!iStall)
iVld <= #1 $random;
always @(posedge clk)
if (reset)
oStall <= #1 1'b0;
else
oStall <= #1 $random;
always @(posedge clk)
if (reset)
oCnt <= #1 8'd0;
else
oCnt <= #1 oCnt + (oVld & !oStall);
// -----------------------------------------------------------------------------
// Clock & Reset
// Generate a synchronized reset
always @(posedge clk or negedge reset_n)
if (!reset_n)
rst <= #1 2'b11;
else
rst <= #1 {rst[0], 1'b0};
always @(posedge clk or negedge reset_n)
if (!reset_n)
reset <= #1 1'b1;
else
reset <= #1 rst[1];
// -----------------------------------------------------------------------------
// FMul
fmul fmul_0 (
.iVld (iVld),
.iStall (iStall),
.iA (iA),
.iB (iB),
.oVld (oVld),
.oStall (oStall),
.oY (oY),
.reset (reset),
.clk (clk)
);
// -----------------------------------------------------------------------------
// Sequencer
ts ts_0 (
.iVld (iVld),
.iStall (iStall),
.iA (iA),
.iB (iB),
.oVld (oVld),
.oStall (oStall),
.oY (oY),
.reset (reset),
.clk (clk)
);
// **************************** FUNCTIONS and TASKS ****************************
endmodule
// *****************************************************************************
/* **************************** MODULE PREAMBLE ********************************
Copyright (c) 2011, ArchiTek
This document constitutes confidential and proprietary information
of ArchiTek. All rights reserved.
*/
// ***************************** MODULE HEADER *********************************
module ts (
iVld,
iStall,
iA,
iB,
oVld,
oStall,
oY,
clk,
reset
);
// ***************************** I/O DECLARATIONS ******************************
input iVld;
input iStall;
output [15:0] iA;
output [15:0] iB;
input oVld;
input oStall;
input [15:0] oY;
input clk;
input reset;
// ************************** LOCAL DECLARATIONS *******************************
reg [15:0] iA;
reg [15:0] iB;
reg [15:0] expY;
reg expC;
wire [15:0] resultY;
wire resultC;
reg [9:0] iSc;
reg [9:0] oSc;
reg simEnd;
wire doEnd;
wire errY;
wire iAlloc = iVld & !iStall;
wire oAlloc = oVld & !oStall;
// ******************************** MODULE BODY ********************************
// Timing synchronizer for expectation
fifo #(18, 8) fifo_0 (
.iVld (iAlloc),
.iStall (),
.iData ({simEnd, expC, expY}),
.oVld (),
.oStall (!oAlloc),
.oData ({doEnd, resultC, resultY}),
.reset (reset),
.clk (clk)
);
// Message out
always @(posedge clk)
if (doEnd)
$finish;
else if (oAlloc)
case (errY)
1'b0: if (resultC)
$display("Skip : oY=%4h\texpY=%4h\t@%d", oY, resultY, oSc);
else
$display(" OK : oY=%4h\texpY=%4h\t@%d", oY, resultY, oSc);
1'b1:
$display(" NG : oY=%4h\texpY=%4h\t@%d", oY, resultY, oSc);
endcase
assign errY = !resultC & (resultY != oY);
// Test in counter
always @(posedge clk)
if (reset)
iSc <= #1 10'd0;
else
iSc <= #1 iSc + iAlloc;
// Test out counter
always @(posedge clk)
if (reset)
oSc <= #1 10'd0;
else
oSc <= #1 oSc + oAlloc;
// Test sequence
always @(
iSc
) begin
simEnd = 1'b0;
case (iSc)
0: begin iA = 16'h0000; // 0
iB = 16'h0000; // 0
expY = 16'h0000; // 0
expC = 1'b0;
end
1: begin iA = 16'h3c10; // 1.015625
iB = 16'h3cf0; // 1.234375
expY = 16'h3d04; // 1.253906
expC = 1'b0;
end
2: begin iA = 16'h1c00; // 2^-8
iB = 16'h2000; // 2^-7
expY = 16'h0000; // 0^-15 ->0
expC = 1'b0;
end
3: begin iA = 16'hffff; // -NaN
iB = 16'hffff; // -NaN
expY = 16'h7fff; // +NaN
expC = 1'b1; // Skip!
end
4: begin iA = 16'h2000; // 2^-7
iB = 16'h2000; // 2^-7
expY = 16'h0400; // 2^-14
expC = 1'b0;
end
5: begin iA = 16'h3db0; // 1.421875
iB = 16'h3da0; // 1.406250
expY = 16'h4000; // 1.999896 ->2.0 (carry)
expC = 1'b0;
end
6: begin iA = 16'h1400; // 2^-10
iB = 16'h1400; // 2^-10
expY = 16'h0000; // 2^-20 ->0
expC = 1'b0;
end
7: begin iA = 16'hfbff; // -Max
iB = 16'h7bff; // +Max
expY = 16'hfc00; // -Infinity
expC = 1'b1;
end
8: begin iA = 16'h3c01; // 1+2^-10
iB = 16'h3c01; // 1+2^-10
expY = 16'h3c02; // 1+2^-9
expC = 1'b0;
end
9: simEnd = 1'b1;
endcase
end
// **************************** FUNCTIONS and TASKS ****************************
endmodule
// *****************************************************************************
‰ٌکHƒfƒUƒCƒ“ > گفŒv—ل [•‚“®ڈ¬گ”“_] > ƒeƒXƒg ژں‚جƒyپ[ƒWپi‰—pFPU‚»‚ج1پj ‚±‚جƒyپ[ƒW‚جTOP پ£
[2]
‚؟‚ب‚ف‚ة’Pگ¸“x‚ب‚çپAٹب’P‚ةfloat‚©‚çhex‚ض‚ج•دٹ·‚ھ‰آ”\‚إ‚·پB—ل‚¦‚خپAfloat‚©‚çhex‚ض‚ج•دٹ·‚ح‚±‚ٌ‚بٹ´‚¶‚إ‚·پB
main()
{
float i;
int *o = &i;
printf("Input: ");
scanf("%f", &i);
printf("%8x\n", *o);
}